<2020년도 하반기>
광운대학교 BARAM이라는 동아리의 활동으로 진행한 프로젝트입니다.
깃허브 https://github.com/Myoung-Jisoo/Robot-Arm-using-OpenPose

1. 주제 선정 동기
전자의수족에 관심이 있어 종종 관련자료들을 찾아보고는 했습니다. 외부상황을 인식해 장갑형태의 로봇손, 절단부위의 잔존근육에서 발생하는 미세한 생체신호(근전도 신호)를 이용하여 컨트롤을 하는 등의 기술 등을 볼 수 있었습니다. 하지만 모든 사람들의 팔 상하단, 손바닥크기 손가락 마디들의 길이가 같지 않듯이, 사람들의 움직임 역시 일반화할 수 없을 것이라는 의문이 들었습니다. 그리고 한 사람의 팔의 움직임을 가장 유사하게 구사할 수 있는 것은 신체 비율이 비슷한 반대쪽 팔이지 않을까 싶은 생각을 가지게 되었습니다. 이에 영상처리를 이용하여 왼팔의 움직임을 읽어 그 정보를 로봇팔(왼쪽)로 전송해 오른팔과 움직임과 비슷하게 구현해내자는 목표를 설정하게 되었습니다.
2. 목표
- 카메라는 한 대만 사용
Open Pose가 한 프레임을 받아오는 시간이 결코 짧지 않기 때문에, 한 대를 사용하는 것이 효율적이라고 생각했습니다.
- 주먹 쥐었다 펴기
손가락을 5개의 모터를 이용해 다 제어하기에는 하드웨어 무게가 감당이 되지 않을 것 같았습니다. 그래서 서보모터 하나만 사용하여 주먹을 쥐었다 펴는 동작을 구현하고자 했습니다.
- 팔꿈치 아래인 팔 하안부 동작 구현
팔꿈치 부분의 모터 2개를 연결해주어야 아래의 1. 팔을 돌리는 동작 / 2. 팔을 구부리는 동작 을 구현하고 싶었습니다.

| 하지만 팔을 돌리는 동작의 경우 z축을 회전시켜 똑같이 구현하려 하게 된다면, 카메라 두 대가 필요했습니다. 그래서 오른쪽의 그림과 같이 모터를 수직으로 연결하는 방식으로 프로젝트를 진행해보기로 결정하게 되었습니다. |  |
3. Hardware Architecture
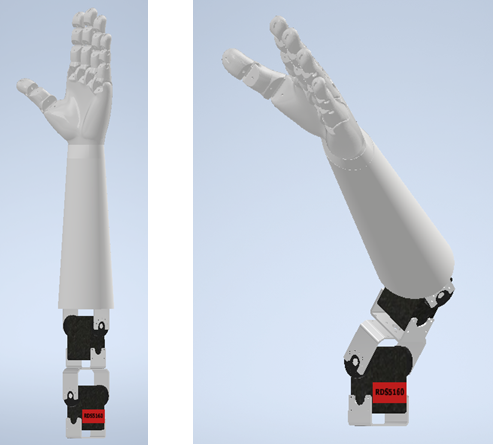
손 부분의 3D 모델링은 Thingivers에서 가져왔고 그 외 부분 모델링은 INVENTOR를 사용했습니다.
사용모터 스펙 :
| RDS5160 | 65x30x48 | 무게 : 162g 동작전압 : 6.0V ~ 8.4V 동작속도(6V) : 0.17sec/60° 동작속도(7.4V) : 0.15sec/60° 동작속도(8.4V) : 0.13sec/60° 토크(6V) : 58kg/cm 토크(7.4V) : 65kg/cm 토크(8.4V) : 70kg/cm 회전각도 : 360° |
4. System Architecture

Open Pose 환경구축
https://myoungziis-study.tistory.com/category/%ED%99%98%EA%B2%BD%EA%B5%AC%EC%B6%95/Open%20Pose
'환경구축/Open Pose' 카테고리의 글 목록
진로를 위해 공부하고 있는 내용들을 정리하는 블로그입니다.
myoungziis-study.tistory.com
'BARAM 동아리 프로젝트 > 동작을 따라하는 2-DOF Robot Arm' 카테고리의 다른 글
| [Atmega128] 서보모터 제어 (0) | 2021.08.05 |
|---|---|
| [Hardware] 손 만들기 (0) | 2021.08.05 |
| OpenPose로 좌표값 받아오기 (2) | 2021.08.05 |
| 완성작 (0) | 2021.08.05 |